Senin, 25 Februari 2013
Analogi Sistem Kontrol
Analogi Sistem Kontrol

Mata operator mendeteksi adanya pergerakan level air melalui skala yang telah ditandai terlebih dahulu. Mata operator dikatakan sebagai Sensor.
Sinyal dari mata (sensor) menuju ke otak, yang mana akan mengetahui adanya deviasi. Otak dapat dikatakan sebagai Kontroler (Controller).
Arm Muscle (Lengan dari klep masukan) dan tangan (aktuator, actuator) memutar klep, disebut sebagai Perangkat Pengontrol (Controlled Device).
Sinyal dari mata (sensor) menuju ke otak, yang mana akan mengetahui adanya deviasi. Otak dapat dikatakan sebagai Kontroler (Controller).
Arm Muscle (Lengan dari klep masukan) dan tangan (aktuator, actuator) memutar klep, disebut sebagai Perangkat Pengontrol (Controlled Device).
Operator mengarahkan untuk menjaga kondisi air didalam tangki melalui klep masukan agar berada pada level antara 1 dan 2. Level permukaan air pada kondisi tersebut disebut sebagai Kondisi Terkontrol (Controlled Condition).
Kondisi Terkontrol atau Daerah Kontrol yang dapat dicapai dengan pengendalian aliran air melalui klep pipa masukan. Aliran arus air (flowrate) tersebut dikenal sebagai Variabel Manipulasi (Manipulated Variable), dan klep masukan disebut sebagai Perangkat Kontrol (Controlled Device).
Air disebut sebagai Agen Kontrol (Control Agent).
Pengendalian aliran air kedalam tangki, maka level air akan berubah. Perubahan level air dalam tangki dikenal sebagai Variabel Kontrol (Controlled Variable).
Pengendalian aliran air kedalam tangki, maka level air akan berubah. Perubahan level air dalam tangki dikenal sebagai Variabel Kontrol (Controlled Variable).
Sedangkan air dalam tangki dikenal sebagai Media Terkontrol (Controlled Medium).
Level air diusahakan dipelihara yang dapat dilihat pada indikator secara visual disebut sebagaiSetpoint (Set Point atau Set Value).
Level air yang dipelihara pada titik diantara 1 dan 2 yang terlihat pada indikator secara visual dan parameter kontrol masih diperkenankan yaitu berada sedikit diatas dasar tangki dan tidak melimpah. Nilai pada daerah ini disebut sebagai Nilai yang diinginkan (Desired Value).
Diasumsikan bahwa level dirawat secara ketat agar berada pada titik antara 1 dan 2. Level air ini berada pada keadaan Mantap (Steady State), dikenal sebagai Nilai Kontrol (Control Value) atau Nilai Nyata (Actual Value).
Tetapi pada kenyataannya level akan berada diantara 1 dan 2, namun masih bekerja dengan baik. Perbedaan antara Setpoint dan Nilai Nyata disebut sebagai Deviasi (Deviation) atau error.
Pengelompokkan sistem kontrol berdasarkan aplikasinya
- 1. Kontrol Proses
Contoh dari kontrol proses adalah sistem close loop yang mempertahankan suhu yang telah ditetapkan dari oven elektrik

Kontrol proses dikelompokkan sebagai :
- proses kontinu
- proses batch
2. Sistem kontrol berurutan
Sistem terkontrol secara berurutan [sequentially controlled system] mengendalikan proses yang didefinisikan sebagai sederetan tugas yang harus dilaksanakan—dengan kata lain, sederetan operasi, satu demi satu. Setiap operasi di dalam deretan dilaksanakan, baik untuk selama waktu tertentu, dalam hal ini disebut digerakkan-waktu [time-driven], maupun sampai tugas tersebut tuntas (sebagaimana ditandai oleh, misalnya, suatu saklar pembatas [limit switch]), dalam hal ini disebut digerakkan-event [event-driven]. Deretanyang digerakkan-waktu bersifat open loop karena tidak ada umpan-balik, sedangkan tugas yang digerakkan-event bersifat close loop karena sinyal umpan-balik diperlukan untuk menetapkan bilamana tugas selesai dilaksanakan.

Langkah pertama dalam daur pencucian adalah mengisi tabung cuci. Ini adalah tugas yang digerakkan-event karena air dibiarkan masuk sampai mencapai tinggi-permukaan yang benar. Dua tugas berikutnya, bilas [wash] dan putar-keringkan [spin-drain], masingmasing dilaksanakan selama periode waktu tertentu dan merupakan langkah-langkah yang digerakkan-waktu.
3. Kontrol gerakan
Kontrol gerakan adalah sistem elektromekanik open loop dan close loop control yang di dalamnya benda-benda mengalami perpindahan. Sistem semacam ini biasanya mengikutkan motor, bagian-bagian mekanik yang bergerak, dan (dalam banyak kasus) sensor-sensor umpan-balik. Macam-macam kontrol gerak :
a. Mekanisme-servo [servomechanism]
Mekanisme-servo [servomechanism] adalah istilah tradisonal yang dipakai untuk menjelaskan sistem kontrol elektromekanik kalang-tertutup yang mengarahkan perpindahan yang cermat dari suatu obyek fisik seperti antena radar atau lengan robot. Biasanya, yang dikendalikan bisa-jadi posisi output atau kecepatan output (atau pun kedua-duanya). Contoh dari mekanisme-servo adalah sistem penentuan posisi untuk antena radar, seperti yang diperlihatkan pada Gambar

b. Kontrol numerik [Numerical Control atau NC]
Mesin-mesin ini dapat secara otomatis memotong dan membentuk benda-kerja tanpa operator manusia. Setiap mesin memiliki seperangkat sumbu [axis] dan parameternya sendiri yang harus dikontrol; sebagai contoh, perhatikan mesin tempa yang diperlihatkan pada Gambar. Benda-kerja [workpiece] yang sedang dibentuk dilekatkan pada meja yang dapat bergerak. Meja tersebut dapat digerakkan (memakai motor-motor elektrik) pada tiga arah: X, Y, dan Z. Laju perkakas-pemotong juga dikontrol secara otomatis. Untuk membuat suatu bagian, meja tersebut menggerakkan benda-kerja melewati perkakas-pemotong [cuttingtool] pada kecepatan dan kedalaman pemotongan yang telah ditetapkan. Dalam contoh ini, empat parameter (X, Y, Z, dan rpm) secara kontinu dan mandiri dikendalikan oleh pengontrol. Sebagai inputnya pengontrol menerima sederetan bilangan yang secara lengkap menggambarkan bagaimana bagian tersebut harus dibuat. Bilangan-bilangan ini termasuk ukuran-ukuran fisik dan rincian seperti laju pemotongan dan laju suapan [feed].

c. Robotika


robot industri yang enam sumbu yang dikontrol secara mandiri terkenal sebagai memiliki enam derajat kebebasan [degree of freedom]
PLC ( Programmable Logic Control )

Sebuah PLC (kepanjangan Programmable Logic control) adalah sebuah alat yang digunakan untuk menggantikan rangkaian sederetan relay yang dijumpai pada sistem kontrol proses konvensional. PLC bekerja dengan cara mengamati masukan (melalui sensor-sensor terkait), kemudian melakukan proses dan melakukan tindakan sesuai yang dibutuhkan, yang berupa menghidupkan atau mematikan keluarannya (logika 0 atau 1, hidup atau mati) Pengguna membuat program (yang umumnya dinamakan diagram tangga atau ladder diagram) yang kemudian harus dijalankan oleh PLC yang bersangkutan, Dengan kata lain, PLC menentukan aksi apa yang harus dilakukan pada instrumen keluaran berkaitan dengan status suatu ukuran atau besaran yang diamati. PLC banyak digunakan pada aplikasi-aplikasi industri, misalnya pada proses pengepakan, penanganan bahan, perakitan, otomatis dan sebagainya. Dengan kata lain, hampir semua aplikasi yang memerlukan kontrol listrik atau elektronik membutuhkan PLC.
Guna memperjelas contoh penggunaan PLC ini, misalnya diinginkan saat suatu saklar ON, akan digunakan untuk menghidupkan sebuah selenoida selama 5 detik, tidak peduli berapa lama saklar tersebut ON. Kita bisa melakukan hal ini menggunakan pewaktu atau timer. Tetapi bagaimana jika yang dibutuhkan 10 saklar dan 10 selenoida, maka kita akan membutuhkan 10 pewaktu. Kemudian bagaimana jika kemudian dibutuhkan informasi berapa kali masing-masing saklar dalam kondisi ON, tentu saja akan membutuhkan pencacah eksternal. Demikian seterusnya, makin lama makin kompleks.
Dengan demikian, semakin kompleks proses yang harus ditangani, semakin penting penggunaan PLC untuk mempermudah proses-proses tersebut (dan sekaligus menggantikan beberapa alat yang diperlukan). Selain itu sistem kontrol proses konvensional memiliki beberapa kelemahan, antara lain :
§ perlu kerja keras saat dilakukan pengkabelan
§ Kesulitan saat dilakukan penggantian dan/atau perubahan;
§ Kesulitan saat dilakukan pelacakan kesalahan;
§ Saat terjadi masalah, waktu tunggu tidak menentu dan biasanya lama.
Sedangkan penggunaan kontroler PLC memiliki beberapa kelebihan dibandingkan
dengan sistem kontrol konvesional, antara lain:
§ Dibandingkan dengan sistem kontrol proses konvensional, jumlah kabel
yang dibutuhkan bisa berkurang hingga 80 %
§ PLC mengkonsumsi daya lebih rendah dibandingkan dengan sistem kontrol
proses konvensional (berbasis relay);
§ Fungsi diagnostik pada sebuah kontroler PLC membolehkan pendeteksian
kesalahan yang mudah dan cepat;
§ Perubahan pada aurutan operasional atau proses atau aplikasi dapat
dilakukan dengan mudah, hanya dengan melakukan perubahan atau
penggantian program, baik melalui terminal konsol maupun komputer PC;
§ Tidak membutuhkan spare part yang banyak;
§ Lebih murah dibandingkan dengan sistem konvensional, khususnya dalam
kasus penggunaan instrumen I/O yang cukup banyak dan fungsi operasional
prosesnya cukup kompleks;
§ Ketahanan PLC jauh lebih baik dibandingkan dengan relay auto-mekanik
Minggu, 17 Februari 2013
Viskositas
Viskositas merupakan pengukuran dari ketahanan fluida yang diubah baik dengan tekananmaupun tegangan. Pada masalah sehari-hari (dan hanya untuk fluida), viskositas adalah "Ketebalan" atau "pergesekan internal". Oleh karena itu, air yang "tipis", memiliki viskositas lebih rendah, sedangkan madu yang "tebal", memiliki viskositas yang lebih tinggi. Sederhananya, semakin rendah viskositas suatu fluida, semakin besar juga pergerakan dari fluida tersebut..
Viskositas menjelaskan ketahanan internal fluida untuk mengalir dan mungkin dapat dipikirkan sebagai pengukuran dari pergeseran fluida. Sebagai contoh, viskositas yang tinggi dari magma akan menciptakan statovolcano yang tinggi dan curam, karena tidak dapat mengalir terlalu jauh sebelum mendingin, sedangkan viskositas yang lebih rendah dari lava akan menciptakan volcano yang rendah dan lebar. Seluruh fluida (kecuali superfluida) memiliki ketahanan dari tekanan dan oleh karena itu disebut kental, tetapi fluida yang tidak memiliki ketahanan tekanan dan tegangan disebut fluide ideal.
Studi dari bahan yang mengalir disebut Rheologi, yang termasuk viskositas dan konsep yang berkaitan.
Secara Umum, pada setiap aliran, lapisan-lapisan berpindah pada kecepatan yang berbeda-beda dan viskositas fluida meningkat dari tekanan geser antara lapisan yang secara pasti melawan setiap gaya yang diberikan. Hubungan antara tekanan geser dan gradiasi kecepatan dapat diperoleh dengan mempertimbangkan dua lempeng secara dekat dipisahkan dengan jarak y, dan dipisahkan oleh unsur homogen. Asumsikan bahwa lempeng sangat besar dengan luas penampang A, dan efek samping dapat diabaikan, dan lempeng yang lebih rendah tetap, anggap gaya F dapat diterapkan pada lempeng atas. Jika gaya ini menyebabkan unsur antara lempeng mengalami aliran geser dengan gradien kecepatan u/y, unsur disebut fluida.
Teori Newton
Ketika sebuah tekanan shear diterapkan kepada sebuah benda padat, badan itu akan berubah bentuk sampai mengakibatkan gaya yang berlawanan untuk mengimbangkan, sebuah ekuilibrium. Namun, ketika sebuah tekanan shear diterapkan kepada sebuah fluid, seperti anginbertiup di atas permukaan samudra, fluid mengalir, dan berlanjut mengalir ketika tekanan diterapkan. Ketika tekanan dihilangkan, umumnya, aliran berkurang karena perubahan internal energi.
Gerbang Logika AND (Gate AND)
Gerbang logika merupakan dasar dari pembentukan sistem
digital.Gerbang logika beroprasi dengan biner,
sehingga disebut juga gerbang logika biner.Tegangan yang
digunakan dalam gerbang logika tinggi atau rendah. Tegangan tinggi berarti 1,
sedangkan tegangan rendah berarti 0.
Gerbang
AND digunakan untuk menghasilkan logika 1 jika semua masukan mempunyai logika 1.
Jika tidak maka dihasilkan logika 0. Daftar yang
berisi semua kemungkinan keadaan masukan dan keluaran disebut sebagai tabel kebenaran dari gerbang
yang bersangkautan.
Dalam ungkapan boole fungsi
AND dinyatakan dengan sebuah titik (dot,.) sehingga sebuah gerbang AND yang mempunyai
2 masukan A dan B keluarannya bias dinyatakan sebagai:
F=A.B
atau F=B.A

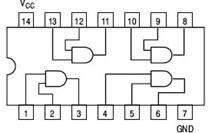
Simbol Gate AND
Gambar Kerja
Tabel Kebenaran Gate AND 2 Input

Langganan:
Postingan (Atom)